
Miércoles-técnico – Uso de mallas superpuestas para la evaluación de problemas con movimiento de cuerpos rígidos
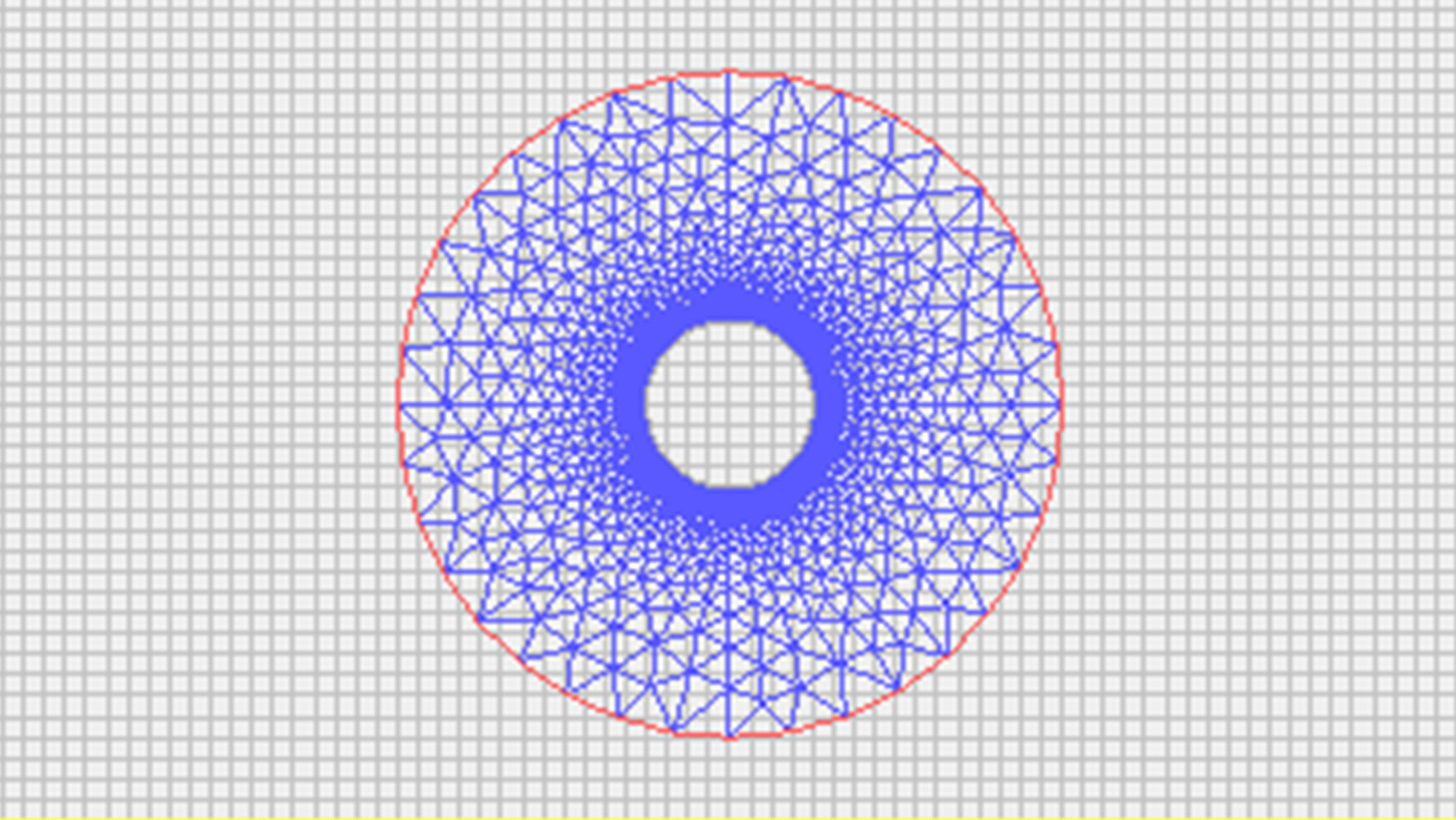
El uso de mallas superpuestas trata de utilizar dos o más mallas para el mismo problema, donde una malla establecerá el dominio completo, y las demás serán responsables de definir los detalles de este dominio. Como se muestra en la Figura 1, la malla en color gris representa el dominio y la malla en color azul define un detalle de la geometría. El versión 17.0 de ANSYS ha traído esta nueva aplicación para el Fluent, el uso de mallas superpuestas (Overset Mesh).
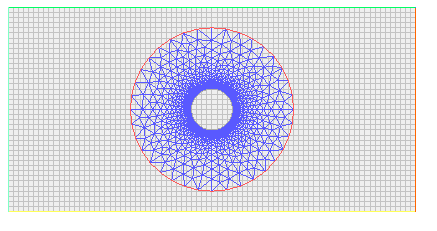
Figura 1. Mallas superpuestas (Overset Mesh)
Por lo tanto, esta aplicación se puede utilizar en los casos en que la geometría tiene detalles locales donde la malla puede ser generada localmente para la discretización de esta región, o para los casos donde hay movimiento de malla alrededor de una pared o sólido, lo que permite el desplazamiento relativo de la malla alrededor del cuerpo rígido sin su deformación, evitando el uso de re-meshing o smoothing de la malla. Por lo tanto, el uso de mallas superpuestas se convierte en una alternativa a los problemas con el movimiento de cuerpos rígidos (6DoF) proporcionando mayor desplazamiento con un menor coste computacional.
Las pruebas de movimiento de cuerpos rígidos (6DOF) con y sin el uso de malla Overset mostraron una reducción del tiempo de cálculo de aproximadamente 40% cuando se utilizan mallas superpuestas. Para las pruebas fue considerada la caída libre de una esfera en el agua, suponiendo un tiempo total de caída de 7e-1 segundos con un paso de tiempo de 1e-3 segundos. La tabla 1 muestra el tiempo de cálculo para cada una de las simulaciones. Estos resultados muestran el enfoque propuesto para el uso de 6DoF con Overset Mesh como una alternativa viable con un costo computacional menor para este tipo de problemas.

Tabla 1: tiempo computacional obtenido utilizando diferentes enfoques para el problema de movimiento de cuerpos rígidos.
En el caso del uso de mallas superpuestas en los problemas con el movimiento de cuerpos rígidos, es necesario tener al menos dos mallas, un contenido el dominio completo y otro cerca de las paredes del cuerpo, este último se moverá obedeciendo los grados de libertad establecidos para el movimiento del cuerpo. Es importante asegurarse de que los elementos en la región de superposición tienen tamaños compatibles, siendo recomendable el uso de un tamaño de malla en la región de superposición de hasta dos veces el tamaño de los elementos de malla adyacente.
Para cargar la malla en Fluent, primero necesario leer una malla usando “Read > Mesh”, ya otras mallas serán cargadas en “Append > Append Case File”. Con las mallas cargadas, debe definir las fronteras exteriores de las mallas superpuestas como condición de contorno como «Overset”, así el solver entenderá que hay superposición y que los valores se interpolan entre las dos mallas. Es importante evidenciar que una baja calidad en la interface entre las mallas puede conducir a resultados inválidos. Con la condición de contorno de “Overset” definida, se debe definir la interface entre las dos mallas de “Overset Interfaces”, como se muestra en la figura 2.

Figura 2. Setup de la interface entre las mallas superpuestas.
El montaje del setup para la superposición de mallas es muy simple. Tenga en cuenta que para asegurar buenos resultados es importante que la calidad de la malla sea adecuada y que el tamaño de malla en la región de superposición sea de hasta dos veces el tamaño de los elementos de malla adyacente.
El punto principal de este artículo es el uso de esta metodología para el movimiento de cuerpos rígidos. Este procedimiento puede ser utilizado para cualquier problema usando mallas superpuestas. En CFD, el movimiento de cuerpos se define mediante el establecimiento de la masa del cuerpo, los componentes del momento de inercia del cuerpo y cualquier otras fuerzas, además de las fuerzas ejercidas por el fluido sobre dicho cuerpo. Estas informaciones definen los grados de libertad para el movimiento del objeto. Es posible definir hasta seis grados de libertad, dos grados en la dirección x, dos en la dirección y dos en z. Hasta la versión 17.1, Fluent necesitaba una UDF para definir esta información, como se muestra en la Figura 3. Desde la versión 17.2, esas informaciones pueden ser introducidas por el usuario directamente en la interface del solver, como en la Figura 4.

Figura 3. UDF simplificada para determinar los grados de libertad del cuerpo

Figura 4. Setup 6DoF en Fluent v.17.2.
Después de definir los grados de movimiento, debe ser definido que la malla superpuesta contiene un cuerpo rígido y que esta malla se moverá siguiendo el movimiento del objeto. Para ello, debe definir tanto la región de la malla superpuesta como la condición de contorno da pared del cuerpo como siendo tipo “Rigid Body” en “Dynamic Mesh Zones”. Es válido señalar que la malla debe definirse como pasiva, activando la opción “Passive”, como en la figura 5. Esta opción define que la malla no será influenciada por el flujo, sólo irá seguir el movimiento de la condición de contorno de las paredes del objeto. Así, esta opción debe ser desactivada para las paredes del objeto.
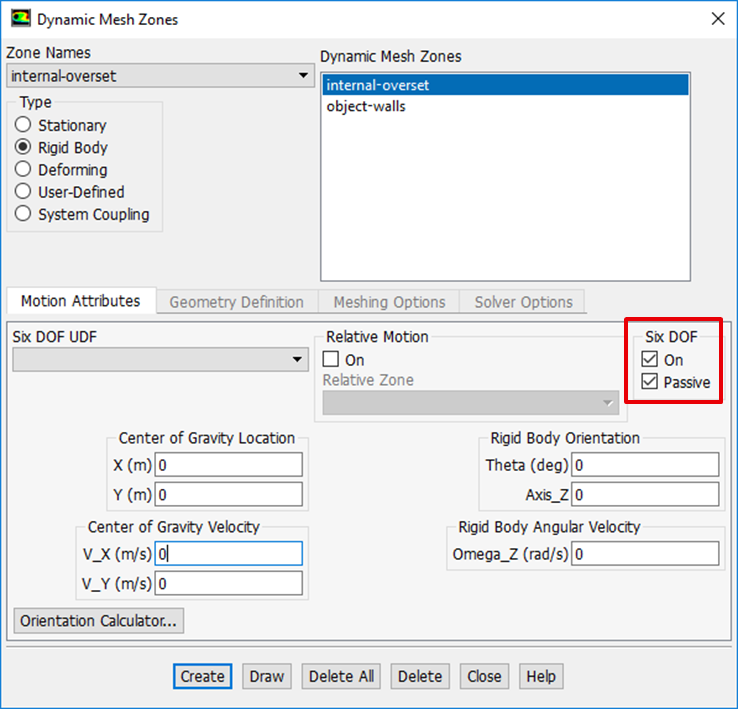
Figura 5. Setup de regiones del cuerpo rígido
El modelo 6DOF todavía no se ocupa de la interacción del objeto con las paredes de dominio. Por lo tanto, el modelo requiere que haya al menos tres elementos de malla entre las paredes del cuerpo y los límites de dominio. Esta limitación es sólo en el modelo 6DOF, o sea, a pesar de no utilizar el recurso de mallas superpuestas, todavía es necesario respetar esta limitación. Con relación al uso de mallas superpuestas, siendo una nueva metodología, el post-procesamiento en la versión actual (v.17.2) está limitado para el CFD-Post.
